
Control of Aquatic Drones for Maritime Tasks (CORATAM)

The sea represents one of Portugal’s main resources. Novel ways of exploring and exploiting maritime opportunities are of particular interest given the proposed expansion of Portugal’s continental shelf. Collectives of aquatic drones have the potential to take on essential tasks such as prospecting sites for aquaculture, environmental monitoring, sea life localization, bridges inspection, sea border patrolling, and so on. Many of these tasks require distributed sensing, scalability, and robustness to faults, which can be facilitated by collectives of robots with decentralized control based on principles of selforganization. In this project, we explore the applicability of a novel hybrid approach to the synthesis of control systems for a collective of aquatic drones.
JBotEvolver
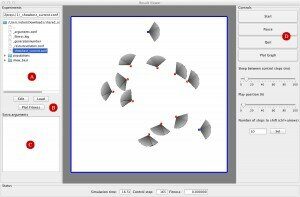
JBotEvolver is a Java-based open-source and versatile simulation platform for education and research-driven experiments in evolutionary robotics (ER). JBotEvolver has been used in previous ER studies of our research group, from offline evolution to online evolution and learning, and from single to multi- robot systems, and in a number of undergraduate and graduate courses at ISCTE-IUL.
The source code and documentation can be found at https://github.com/BioMachinesLab/jbotevolver
Conilon
Conilon is a lightweight distributed computing platform. It allows Java-based tasks to be computed on a grid of computers with minimal effort and overhead. The necessary Java classes are loaded by worker nodes as needed.
The source code can be found at https://github.com/BioMachinesLab/conilon